





华为高阶自动驾驶传感器:如何演进毫米雷达?
华为HI发布会纪要
免责声明:本纪要仅供方正证券的客户使用,本公司不会因接收人收到本纪要而视其为本公司的当然客户;会议纪要由方正证券科技团队翻译/整理,可能存在与该公司官方公布的纪要原文/录音有不一致或不准确之处,请投资者以上市公司发布的纪要原文/录音为准;会议纪要内容仅供投资者参考,不包含任何方正证券研究所的投资意见和建议,投资者需自行承担投资决策的风险。
公司名称:HI与您相约2021新品发布会
会议时间:2021年4月18日
1、华为鸿蒙
2、华为MDC
3、华为八爪鱼
在《电车终局》,和《智能汽车终局》深度报告中已经介绍了未来无人驾驶是异构OS操作系统
华为有三大计算平台+三大操作系统:
1、智能驾驶计算平台:AOS(智能驾驶操作系统)
2、智能座舱计算平台:HOS(智能座舱操作系统)
3、智能车控计算平台:VOS(智能车控操作系统)
同时发布我们下一代毫米波雷达新产品的发布。我们是2017年开始,毫米波技术预研,大概做了两年的时间,然后完成了技术的验证以及市场的可研,确定了第一代产品的方向。我们大概2019年开始了正式的商务产品的开发,大概做了有一年多的时间以后,我们在去年实现了首次的陆试以及包括冬试、夏试,第一年会实现首项目的量产。那么2022年到223年要走向更多项目的量产,我们已经可以快速的实现超过100万的发货。那么这里要特别感谢过去几年充分信任我们,给我们很大帮助很大支持的主机厂还有合作伙伴。

在我们做第一代雷达的同时,实际上我们也在考虑自动驾驶或者体验意义上的自动驾驶如何走向量产,它对传感器带来全新的要求。辅助驾驶可能更多关注人和车的进展,但是对于自动驾驶要求的更全面的目标检测以及更高的执行度,比如准确检测到100米外的障碍物,同时它对覆盖率有很高的提升。举个例子,它可以刚刚看到300米外的车,也可以看到横向的±60度的检测范围,这样的话传感器要求是大幅提升的,我们总结下来自动驾驶的对传感器的要求变成4个全:全目标、全覆盖、全工况和全天候,基本上就是一个非常理想的创新的目标。
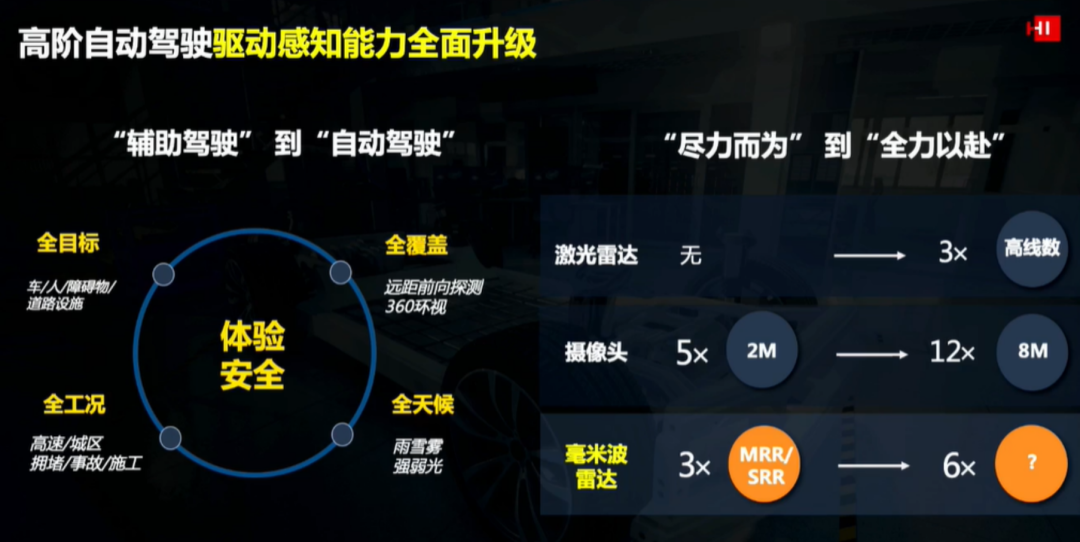
基于这些诉求,摄像头率先引进。它从200万像素变成800万像素,然后它的搭载的数量也从每车5个变成每车的12个以上。那么高速的激光也在上面搭载,剩下一个命题实际上就是毫米波雷达,毫米雷达该如何演进?
我们认为毫米波雷达的下一个方向就是高分辨的4D成像雷达。4D解释一下,4D是指目标探测的4个维度,包括它的速度、距离、水平角度、垂直高度。传统上毫米波雷达的测速和测距的能力非常好,但是它的水平分辨率相对比较低,垂直分辨率基本上没有。导致它看不远也看不清。那么在今年发现了很多的自动驾驶的事故中,传感器的能力不足是一个关键的因素之一。比如说看不清道内的静止车辆或者事故车辆,比如说看不清到内的这种隔离栏,这些都导致了一些严重的事故。

那么4D毫米波雷达通过大幅的提升水平和垂直检测能力,是有机会率先满足全目标、全覆盖、多工况的一个感知要求,逐步接近理想传感器的要求。那么这样的话它可以和摄像头和激光雷达一起形成一个有效的融合,打造一个满足自动驾驶要求的感知铁三角。
那么今天我们非常高兴正式的发布华为高分辨4d成像雷达,它的能力在三方面我们认为有一个突破性的进展,第一高分辨它的水平分辨率达到了一度,垂直分辨率达到了两度,同时测量的精度有大幅的提升。第二是大视场无模糊,那么它的水平的视场从±45度提升到±60度,垂直市场从±9度提升到±15度,纵向的探测距离也从200米提升到了300米以上。

第三作为综合能力提升的一个结果,毫米波雷达也可以像激光一样输出点云,而且是比激光多一个速度维度的点云,那么4点云可以带来更多的感知的应用,比如说环境刻画,比如说基于毫米毫米波雷达的构图与定位,当然也可以通过多雷达的点云融合去实现车周360度的检测。下面我们来详细解释一下这三个能力。

 分享
分享








最新活动更多
-
3月27日立即报名>> 【工程师系列】汽车电子技术在线大会
-
6月13日立即参评>> 【评选启动】维科杯·OFweek(第四届)2025汽车行业年度评选
-
即日-6.18立即报名>> 【在线会议】英飞凌OBC解决方案——解锁未来的钥匙
-
6月19日立即报名>> 【在线研讨会】安世汽车车身照明方案
-
即日-6.30免费下载>> 西门子数字化工业软件电池新国标合规方案
-
7月22-29日立即报名>> 【线下论坛】第三届安富利汽车生态圈峰会



中国人工智能产业大会智能汽车论坛")
-
10 雪佛兰,好走不送!



发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论