





在自动驾驶领域中,特斯拉为什么如此需要超级计算机?
电车汇消息:近日,特斯拉公布了新型超级计算机,就每秒浮点运算(FLOPS)而言,它是世界上排名第五的超级计算机。新机器是特斯拉的第三个超级计算机集群,为还未发布的超级计算机Dojo(Dojo发音源自日语,意为“道场”)的开发原型版本。一切顺利的话,超级计算机Dojo将超越目前世界排名第一的日本超级计算机富岳(Fugaku,富士山的别名)。
以上消息来自特斯拉人工智能与自动驾驶视觉总监AndrejKarpathy在2021年计算机视觉和模式识别会议(CVPR2021)上所作的报告。
在2019年的特斯拉自动驾驶开放日(AutonomyDay)上,特斯拉CEO马斯克曾“剧透”了Dojo项目——专门用于大规模的图像和视频数据处理,其浮点运算能力达到了exaflop级别,也就是每秒运算百亿亿次。
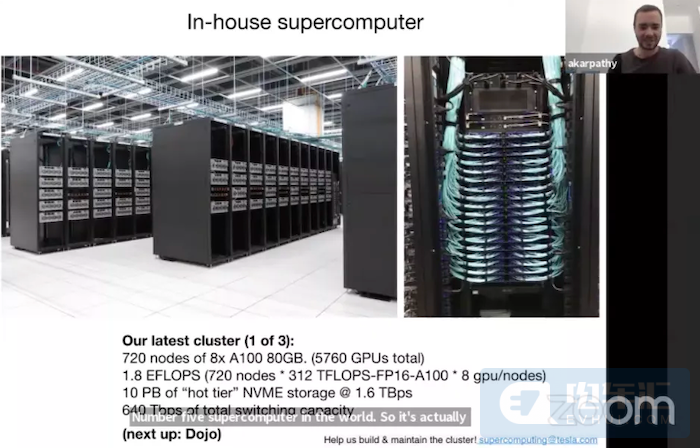
Karpathy表示,我们展示的是使用720个80GB版本的8xA100节点构建的集群。这是一台巨大的超级计算机,就每秒浮点(FLOPS)运算次数而言,我认为它可能是全球第五的超级计算机。第五位目前由英伟达公司的Selene集群占据,该集群拥有非常相似的架构和类似的GPU数量(4480对我们的5760,所以少一点)。
他于论坛中展示了它的三个集群之一的照片,并公布了新超级计算机的能力:总算力达1.8EFLOPS(EFLOPS指每秒百亿亿次浮点运算),由5760个算力为321TFLOPS(TFLOPS指每秒万亿次浮点运算)的A100显卡组成720个节点,有10PB的存储空间,读写速度为1.6TBps。
Karpathy称,如果想要让计算机以人类的方式对新环境做出反应,这需要一个巨大的数据集,以及超级计算机的处理能力,从而利用从整个车队收集来的数据训练和改进特斯拉自动驾驶仪(Autopilot)和为下一代自动驾驶人工智能(AI)提供动力的神经网络。
而在所有自动驾驶公司中,特斯拉尤为需要超级计算机。
因为马斯克主张采用纯视觉的自动驾驶方法,其依靠摄像头和机器学习来支持其高级驾驶辅助系统和自动驾驶,而非采用激光雷达(LiDAR)、摄像头和雷达。在纯视觉自动驾驶方法下想改进这套自动驾驶AI达到足够的可靠性,自研适应计算需要的超级计算机便极为必要。
文章摘自 电车汇 20210623 发自北京

 分享
分享








最新活动更多
-
3月27日立即报名>> 【工程师系列】汽车电子技术在线大会
-
6月13日立即参评>> 【评选启动】维科杯·OFweek(第四届)2025汽车行业年度评选
-
即日-6.18立即报名>> 【在线会议】英飞凌OBC解决方案——解锁未来的钥匙
-
即日-6.30免费下载>> 西门子数字化工业软件电池新国标合规方案
-
7.30-8.1火热报名中>> 全数会2025(第六届)机器人及智能工厂展
-
7月30-31日报名参会>>> 全数会2025中国激光产业高质量发展峰会



中国人工智能产业大会智能汽车论坛")



发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论