





PreScan快速入门到精通第三十四讲:基于PreScan进行超声波雷达传感器仿真
34.3.3 天线选项卡

天线模式由恒定增益或用户定义的增益图定义。该图描述了声级和方向(方位角和海拔)的相关性。请参考 "天线增益 "中的确切描述。天线增益图的精确布局请参考雷达对话标签中的天线标签。需要注意的是,当可视化用户定义的增益图时,配置的FOV不会被考虑在内。例如,如果FOV方位角设置为90度(-45至+45度),但用户定义的增益图从-90度到+90度,它仍然会显示完整的天线增益模式。
34.3.4系统标签
系统选项卡描述的是典型的超声波传感器的参数。
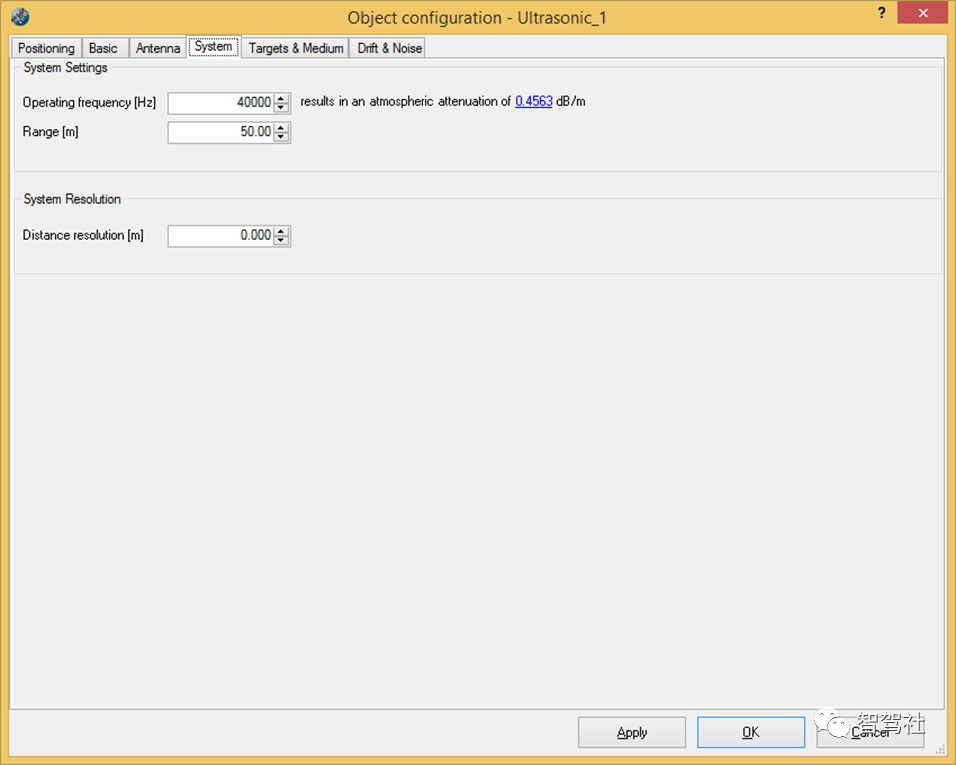
频率与环境设置(如湿度、空气温度和大气压力)相结合,决定了信号在大气中的衰减。
范围参数定义了物体被纳入计算的距离限制。通过范围参数可以控制系统的性能。
距离分辨率定义了距离的报告方式。如果两个对象位于一个分辨率单元内,那么位于某个分辨率单元内的对象将以相同的距离进行报告,尽管在实践中它们会略有不同。如果分辨率的值设置为0,则会报告每个检测到的物体的准确位置。
34.3.5 目标和中选项卡

Targets and Medium(目标和介质)选项卡用于配置大气衰减。该值可以显式或隐式设置。如果显式设置,大气衰减是在框中输入的值,单位为dB/m,否则当隐式设置时,该值将通过环境设置自动计算。
天气设置(降水/雾)不会自动影响结果。用户应该通过衰减值来仿真天气的影响。
34.3.6 漂移和噪音选项卡

在漂移部分,可以选择无、零均值高斯或单向漂移类型。
在噪声部分,可以输入类似的信息。该部分与漂移部分的一个明显区别是,您可以定义哪些噪声被分配到照明路径的开始('x%'),哪些部分被分配到反射路径的开始('100-x%')。照明路径开始处的噪声是光束上的几何噪声;它影响光束的方向。照明路径末端的噪声是测量噪声;它适用于测量数据。
此外,噪声叠加方法可以选择,加法或乘法。

其中噪声项n是一个标准偏差s的零均值高斯("正态")分布值。

 分享
分享








最新活动更多
-
3月27日立即报名>> 【工程师系列】汽车电子技术在线大会
-
5月22日立即预约>>> 宾采尔激光焊接领域一站式应用方案在线研讨会
-
6月13日立即参评>> 【评选启动】维科杯·OFweek(第四届)2025汽车行业年度评选
-
即日-6.18立即报名>> 【在线会议】英飞凌OBC解决方案——解锁未来的钥匙
-
免费下载立即下载>> 前沿洞察·2025中国新型储能应用蓝皮书
-
免费下载立即下载>> 2025锂电市场格局及未来研判蓝皮书



中国人工智能产业大会智能汽车论坛")



发表评论
请输入评论内容...
请输入评论/评论长度6~500个字
暂无评论
暂无评论